


Sterownik serwo krokowy HMD86 AC digital wyświetlacz-RED
Dodaj recenzję:- HMD86/RED
- Producent: CNC PROFI
- Waga: 0.3 kg
-
Dostępność:
 Jest
Czas realizacji: na stanie magazynowym
Jest
Czas realizacji: na stanie magazynowym
- Cena netto: 242,28 zł / szt. 298,00 zł / szt.
Sterownik serwokrokowy z wyświetlaczem LED 8 A dwufazowy hybrydowy do silnika serwokrokowego
Sterownik wykorzystuje 32-bitową technologię sterowania wektorowego, która zapobiega utracie synchronizacji ruchu oraz zapewnia dokładność.
Zwiększa znacznie wydajność przy wysokich prędkościach oraz moment obrotowy silnika krokowego.
Kontrola prądu w oparciu o obciążenie skutecznie zmniejsza wzrost temperatury silnika i przedłuża zarazem żywotność silnika.
Monitorowanie sygnału Enkodera o położeniu i sterowanie alarmem do komputera.
Alarmu pozycji Enkodera poza tolerancją zapewnia bezpieczną pracę obrabiarki.
Sterownik jest doskonałym zamiennikiem tradycyjnego sterownika krokowego.
Funkcje:
Krokowy układ pętli zamkniętej bez utraty synchronizacji ruchu.
Poprawny moment siły i prędkości wyjściowej silnika.
Prąd jest regulowany w zależności od obciążenia, zmniejszając wzrost temperatury silnika.
Silnik pracuje płynnie, większa dynamika przyspieszania i zwalniania.
Statyczna zdolność zerowej prędkości bez wibracji po zakończeniu pozycjonowania.
Wyświetlanie podczas pracy rzeczywistej prędkości obrotowej silnika w obrotach/min.
Bardzo łatwe wprowadzanie parametrów nawet podczas pracy silnika.
Proste określenie nieprawidłowej pracy na podstawie błędów wyświetlanych na wyświetlaczu LED.
Ustawianie mikro kroków: Wybór 200-60 000 zdefiniowane przez użytkownika
Obsługuje ochronę nadprądową, ochronę przed przepięciami oraz ochronę pozycji poza tolerancją.
Specyfikacja:
Napięcie zasilania: AC 20V ~ 80V / DC 30 ~ 110V
Szczytowy prąd wyjściowy: 8A (prąd zmienia się wraz z obciążeniem)
Prąd wejściowy logiki: 7 ~ 20mA
Częstotliwość impulsów: 0 ~ 200 KHz
Sterowanie krok kierunek (Step – Dir 5V )
Precyzyjne pozycjonowanie z kontrolą enkodera 4000 A -A : B -B - imp./obrót,
100% moment obrotowy silnika napędu
Zmienna prądu technologia sterowania
Wysoka wydajność prądowa, niskie wibracje,
Stabilna praca przy niskiej prędkości.
Zabezpieczenie nad prądowe, ochrona przed przepięciami i kontrola błędu pozycji.
Posiadamy zestawy serwo krokowe ze sterownikiem:
SRK0403 - Zestaw servo krokowy 3 Nm 4A 56/56 mm z sterownikiem HMD86
SRK0404 - Zestaw servo krokowy 4 Nm 4A 60/60 mm z sterownikiem HMD86
SRK0486 - Zestaw servo krokowy 4,5 Nm 6A 86/86 mm z sterownikiem HMD86
SRK0686 - Zestaw servo krokowy 6 Nm 6A 86/86 mm z sterownikiem HMD86
SRK0886 - Zestaw servo krokowy 8,5 Nm 8A 86/86 mm z sterownikiem HMD86
SRK1286 - Zestaw servo krokowy 12 Nm 8A 86/86 mm z sterownikiem HMD86
SRK21110 - Zestaw servo krokowy 21 Nm 8A 110/110 z sterownikiem HMD86
SRK28110 - Zestaw servo krokowy 28 Nm 8A 110/110 z sterownikiem HMD86
Jeżeli nie jesteś pewien, który zestaw będzie do twojej maszyny odpowiedni skontaktuj się z nami a my Tobie dobierzemy.
Więcej informacji technicznych tel. 602 280 501
Instrukcji ustawienia parametrów sterownika HMD86 RED
Parametry
Nowy sterownik HMD86 32-bitowy inteligentny układ specjalny do sterowania silnikiem;
4-bitowy wyświetlacz LED z 4 klawiszami do obsługi, intuicyjna i wygodna obsługa;
Zaawansowany algorytm sterowania prądem wektorowym, prędkością i pozycją w zamkniętej pętli; Prąd można ustawić dowolnie (w zakresie 0-8A);
Silnik jest wyposażony w precyzyjny enkoder fotoelektryczny o rozdzielczości 4000 linii A-A,B-B.
Izolowane wejście sygnału różnicowego, częstotliwość odpowiedzi impulsowej 200 kHz;
Dowolne ustawienie podziału (200-60000), które można wykorzystać w każdej sytuacji;
Posiada funkcje zabezpieczające przed przetężeniem, przepięciem, nadmierną prędkością, przegrzaniem, błędem śledzenia poza tolerancją .
Ma zastosowanie do różnych małych i średnich urządzeń i instrumentów automatyki, takich jak maszyna do grawerowania CNC, frezarki CNC ,tokarki CNC, maszyna do ściągania izolacji, maszyna do znakowania, maszyna do cięcia CNC, fotoskład laserowy, ploter CNC, obrabiarki CNC, sprzęt do automatycznego montażu CNC itp. Efekt aplikacji jest szczególnie dobry w sprzęcie o niskim poziomie hałasu i dużej dokładności oczekiwanej przez użytkowników.
Interfejsu sterownika i okablowania
Numer terminala Symbol Nazwa Opis
1 PUL+ Dodatnie wejście impulsowe Źródło sygnału +5V - 24V nie wymaga łączenia rezystora.
2 PUL- Ujemne wejście impulsowe
3 DIR+ Wejście w kierunku dodatnim Źródło sygnału +5V - 24V nie wymaga łączenia rezystora.
4 DIR- Wejście kierunku ujemnego
5 ENA+ Dodatnie wejście wyłączenia silnika sygnał jest silnik jest wolny i niezablokowany.
6 ENA- Ujemne wejście włączenia silnika
Terminal wyjściowy sygnały pozycji dodatniej
7 Pend+ Wyjście sygnału pozycji dodatniej
8 Pend- Wyjście sygnału pozycji dodatniej
9 ALM+ (BRK+) Wyjście sygnału alarmu/hamowania Ustawienie Parametr P-11 Wybierz Alarm/Hamulec
10 ALM- (BRK-) Wyjście sygnału alarmu/hamowania Sygnał kontrolny:
Terminal wejściowy sygnału enkodera
1 EB+ Wyjście do enkodera B+ Niebieski koloru drutu
2 EB- Wyjście do enkodera B- Czarny koloru drutu
3 EA+ Wyjście do enkodera A+ Biały koloru drutu
4 EA- Wyjście do enkodera A- Zielony koloru drutu
5 VCC Wyjście do ZASILANIA enkodera
6 EGND Wyjście do ZASILANIA enkodera
Terminal wyjściowy zasilanie silnika
1 A+ Uzwojenie silnika fazowego A+ Biały koloru drutu.
2 A- Uzwojenie silnika fazowego A- Zielony koloru drutu.
3 B+ Uzwojenie silnika fazy B+ Niebieski koloru drutu.
4 B- Uzwojenie silnika fazy B- Czarny koloru drutu.
Terminal wejściowy zasilanie sterownika
5 ZASILANIE wejście napięcia AC/DC 18-80 V AC; 24-110V DC bez kierunkowości
6 ZASILANIE wejście napięcia AC/DC 18-80 V AC; 24-110V DC bez kierunkowości
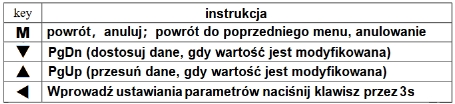
Ustawienia parametru wyświetlacz LED i cztery klawisze:
oraz 4 przycisków M, ▲, ▼, ◀ które służą do wyświetlania różnych stanów systemu, ustawień parametrów itp.
Ustawienia parametru
P-00 Wybór mikro kroków 200-60000 1600 zdefiniowane przez użytkownika
P-01 Prąd silnika trzymania w pętli zamkniętej” 1,0-6,0A 20 ustawienie
P-02 Prąd szczytowy 1,0-8,0A 80 zwykle pozostawia się bez zmian
P-03 Prąd w pętli zamkniętej 6,0-9,0A 80 zwykle pozostawia się bez zmian
P-04 Prąd roboczy w trybie otwartej pętli 1,0-8,0A 40 ustawiony
P-05 Automatyczny półprąd w trybie otwartej pętli 10-90% 50% automatyczna redukcja prądu do zarządzania temperaturą
P-06 Tryb joggingu do przodu i do tyłu za pomocą przycisków ▲ i ▼
P-07 prędkość joggingu 0-100 100 prędkość joggingu, zwykle niezmodyfikowana
P-08 tryb impulsowy 0-1 0 0-impuls + kierunek, 1-AB ortogonalny.
P-09 tryb pracy 0-1 0 0 tryb impulsowy, 1 tryb położenia wewnętrznego
P-10 Ustawienie polaryzacji wyjścia alarmu ALM 0-1 0 Poziom wysoki,1 Poziom niski
P-11 Wybór funkcji ALM 0-1 0 0 Wyjście alarmowe , 1 Sterowanie hamulcem
P-12 Kierunek pracy silnika 0-1 0 0 do tyłu, 1 do przodu
P-13 ENA włącz sterowanie 0-1 1 Włącz przy niskim poziomie (0) Włącz z wysokim poziomem,
P-14 0-5 0 im większa liczba, tym silniejsze filtrowanie Czas przeciwzakłóceniowy
P-16 0-1000ms 10000 zwykle pozostawiono bez zmian Wartość progowa alarmu błędu śledzenia
P-17 0-32000 40000 zazwyczaj pozostawia się bez zmian
P-18 wybór trybu pętli otwartej/zamkniętej 0-1 1 0 pętla otwarta, 1 pętla zamknięta
P-19 wybór trybu pracy pozycji wewnętrznej 0-1 0 0: Praca ciągła 1: Praca jednosegmentowa
P-22 czas opóźnienia zwolnienia hamulca 0-1500ms 0
P-23 czas opóźnienia załączenia hamulca 0-1500ms 100
P-25 Włączenie płynnego filtrowania 0-1 0 0 nie włączone, 1 włączone (ważne)
P-26 Filtr wygładzający pętlę pozycji 0-10000 0
P-27 Czas przyspieszania/zwalniania pętli pozycji. 0-10000 50 szybki startu i zatrzymanie należy dostosować ten parametr.
P-28 Wybór trybu pozycji wewnętrznej 0-1 0 0 tryb względny, 1 tryb bezwzględny
P-29 Początek trybu pozycji wewnętrznej 0-1 0 0 wył., 1 wł
P-39 Pozycja wewnętrzna Funkcja PUL 0-1 0 0 Pauza, 1 Koniec.
Aby przywrócić ustawienia fabryczne, ustaw S-20 na 1! Po ustawieniu funkcji wymagane jest wyłączenie i ponowne uruchomienie.
S-03 Wzmocnienie proporcjonalne pętli prądowej P 1 ~ 32000 1500
Im wyższa ustawiona wartość, tym większe wzmocnienie i większa sztywność”.
S-04 Wzmocnienie całkowe pętli prądowej. I 1 ~ 32000 200 Im mniejsza ustawiona wartość,
tym większa prędkość całkowania, tym silniejsza odporność systemu na odchylenie i większa
sztywność. Jeśli jednak wartość jest zbyt mała, może to spowodować przeregulowanie.
S-05 Wzmocnienie proporcjonalne pętli pozycji. KP 1 ~ 32000 2500 Im wyższa ustawiona wartość,
tym większe wzmocnienie, większa sztywność i szybsze śledzenie pozycji.
Jeśli jednak wartość jest zbyt duża, może to spowodować oscylacje silnika lub przeregulowanie
S-06 Wzmocnienie całkowe pętli pozycji. KI 1 ~ 32000 500
S-07 pętla pozycji. KD 1 ~ 32000 100
S-08 pętla pozycji. KVFF 1 ~ 32000 30 „Im wyższa ustawiona wartość, tym szybsza reakcja śledzenia
prędkości zewnętrznej i większa sztywność.
Zdecydowanie zaleca się korzystanie z parametrów fabrycznych i nie modyfikowanie ich od niechcenia
Kod alarmu
Gdy wystąpi usterka, wyświetli odpowiedni kod alarmu,
Er 01 Przetężenie Gdy prąd przekroczy wartość znamionową, napęd zatrzyma się
Er 02 Nadmierna prędkość Maksymalna prędkość to 3000r/min
Er 03 Pozycja odchylenie Gdy wartość odchylenia pozycji przekracza wartość znamionową, napęd zatrzyma się
Er 04 Przegrzanie Maksymalna wartość przekracza 80°C
Er 05 Ponad DC Napięcie Gdy napięcie wejściowe przekracza wartość znamionową, sterownik przestanie działać,
zakres napięcia AC 20~80V - DC 20~110V
Er 06 EPROM zdarzyło się błąd Odczyt lub zapis EPROM nie powiodło się napęd zatrzyma się
Er 07 Błąd enkodera Sprawdź przewód enkodera, napęd zatrzyma się
Er 08 Błąd silnika Brak fazy silnika, napęd zatrzyma się
Porady
W przypadku kiedy sterownik HMD86 nie pracuje poprawnie, pierwszym krokiem powinno być sprawdzenie czy problem jest natury elektrycznej czy mechanicznej. Konieczność skorzystania z dokumentacji w kturej zawarte wsparcie techniczne rozwiąze zaistniałe problem. Wiele błędów w systemie sterowania ruchem może być związanych zakłóceniami elektrycznymi, błędami oprogramowania urządzenia sterującego lub błędami w podłączeniu przewodów. Poniżej przedstawiono tabelę z najpopularniejszymi problemami, z którymi zgłaszają się klienci do naszego Wsparcia
Objawy przyczyna usterki Postępowanie
Silnik nie pracuje - brak zasilania sterownika - źle dobrane bezpieczniki - złe ustawienia prądu
Błąd sterownika - brak sygnału zezwolenia - wizualnie sprawdzamy świecenie się
poszczególnych diod LED sygnalizujących obecność napięć na urządzeniu.
W przypadku stwierdzenia braku napięcia należy odłączyć zasi lanie szafy sterowniczej i
sprawdzić działanie poszczególnych bezieczników.
Uszkodzone zabezpieczenia wymieniamy na nowe zgodne z aplikacją systemu.
Błąd sterownika - przekroczona wartość napięcia zasilania, zbyt duży prąd na wyjściu sterownika,
przekroczenie wartości limitu błędu pozycjonowania.
Sprawdzamy konfigurację pinu wyjściowego Enable w programie wykon
awczym , możliwe, że trzeba będzie zmienić jego stan na przeciwny (Acive Low).
Sprawdzamy poprawność połączeń z płytą sterownika. Sprawdzamy kod generowany przez sterownik PLC.
Silnik kręci się w złym kierunku - fazy silnika mogą być odwrotnie podłączone
Przy wyłączonym zasilaniu zamieniamy wyprowadzenia jednej fazy silnika
lub zmieniamy kierunek w programie sterującym lub wykonujemy korektę ustawień w sterowniku.
Błąd sterownika - złe ustawienia prądu - zwarcie cewek silnika
Zbyt duża wartość napięcia zasilania. - Sprawdzamy wartość napięcia zasilania. - Dokonujemy korekty.
Możliwe zwarcie na wyjściu sterownika, - możliwe uszkodzenie silnika
Uszkodzone kable sterujące - nie ekranowane - nie uziemienione w systemie
Ruchy silnika - Kable sterujące za blisko kabli silników.
Przerwane uzwojenie silnika - kable nie ekranowane - nie uziemienione